



Automaatne pöörleva laadimise/mahalaadimise prügikast / tööpingi laadimise/mahalaadimise prügikast
Toote rakendusskeem
Tööpingi laadimise ja pimeääriku projekti tehniline skeem
Projekti ülevaade:
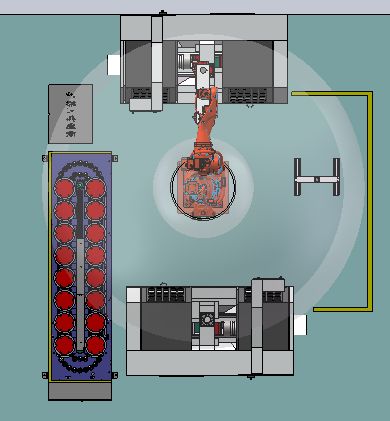
Kasutaja ümarate äärikute protsessi projekteerimise tööjaama voolu kohaselt võtab see skeem kasutusele ühe horisontaalse NC-treipingi, ühe horisontaalse treimis-freesimiskomposiitkeskuse, ühe komplekti CROBOTP RA22-80 robotit koos ühe sidurikomplektiga, ühe roboti aluse, ühe laadimis- ja tühjendusmasina, ühe ümberpööratava laua ja ühe komplekti turvapiirdeid.
Projekti kavandamise alus
Objektide laadimine ja tühjendamine: Ümarad äärikud
Tooriku välimus: Nagu on näidatud alloleval joonisel
Toote kaal: ≤10 kg.
Suurus: Läbimõõt ≤250mm, paksus ≤22mm, materjal 304 roostevaba teras, tehnilised nõuded: Tööpingi laadimine ja tühjendamine vastavalt ümarääriku töötlemiskaardile ning sellel on sellised funktsioonid nagu materjali täpne haaramine roboti poolt ja kukkumise vältimine voolukatkestuse ajal.
Töösüsteem: Kaks vahetust päevas, kaheksa tundi vahetuse kohta.
Skeemi paigutus
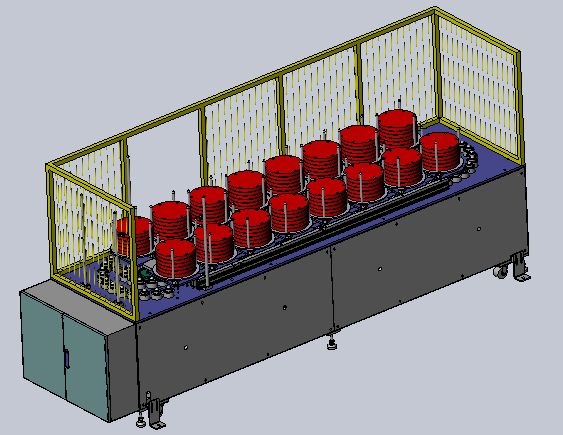
Vajalik silo: Automaatne pöörleva laadimise ja tühjendamise silo
Laadimis-/tühjendussilo jaoks on kasutusele võetud täisautomaatne pöörlev režiim. Töötajad laadivad ja tühjendavad küljelt kaitstult ning robot töötab teisel pool. Kokku on 16 jaama ja iga jaam mahutab maksimaalselt 6 toorikut.
-

Kolmeteljeline horisontaalne pöördepositsioneerija / keevitus...
-

Tööstusroboti prügikast / automaatne tsirkulatsioonikonteiner...
-

Tembeldamis-/virnastamisrobot SDCX RMD-300/200/160/1...
-

Üheteljeline positsioneerija/automaatne keevituspositsioneerija
-

YASKAWA MOTOMAN AR1440 tööstuslik keevitusrobot...
-
test






