



Kolmeteljeline horisontaalne pöördepositsioneerija / keevitusroboti positsioneerija
Tehnilised parameetrid
| Vertikaalse pöördega kolmeteljeline servopositsioneerija | Horisontaalne pöörlev kolmeteljeline servopositsioneerija | ||||||
| Seerianumber | PROJEKTID | Parameeter | Parameeter | MÄRKUSED | Parameeter | Parameeter | MÄRKUSED |
| 1 | Nimikoormus | 500 kg | 1000 kg | Teise telje R400 mm raadiuses | 500 kg | 1000 kg | Teise telje R400mm/R500mm raadiuses |
| 2 | Spindli standardne pöörlemisraadius | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Võlli standardne pöörlemisraadius | R400mm | R500mm | R400mm | R500mm | ||
| 4 | Esimese telje pööramisnurk | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Teise telje pöördenurk | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Esimese telje nimikiirus ülespoole | 50°/Lõuna | 24° lõunalaiust | 50°/Lõuna | 24° lõunalaiust | ||
| 7 | Teise telje nimipöörlemiskiirus | 70°/Lõuna | 70°/Lõuna | 70°/Lõuna | 70°/Lõuna | ||
| 8 | Korduva positsioneerimise täpsus | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Nihkeraami piirmõõde (pikkus × laius × kõrgus) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Positsiooninihutaja üldmõõtmed (pikkus × laius × kõrgus) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Esimese telje pöörde keskpunkti kõrgus | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Toiteallika tingimused | Kolmefaasiline 200 V ± 10% 50 Hz | Kolmefaasiline 200 V ± 10% 50 Hz | Kolmefaasiline 200 V ± 10% 50 Hz | Kolmefaasiline 200 V ± 10% 50 Hz | Eraldustrafoga | |
| 13 | Isolatsiooniklass | H | H | H | H | ||
| 14 | Seadme netokaal | Umbes 1800 kg | Umbes 3000 kg | Umbes 2000 kg | Umbes 2000 kg | ||
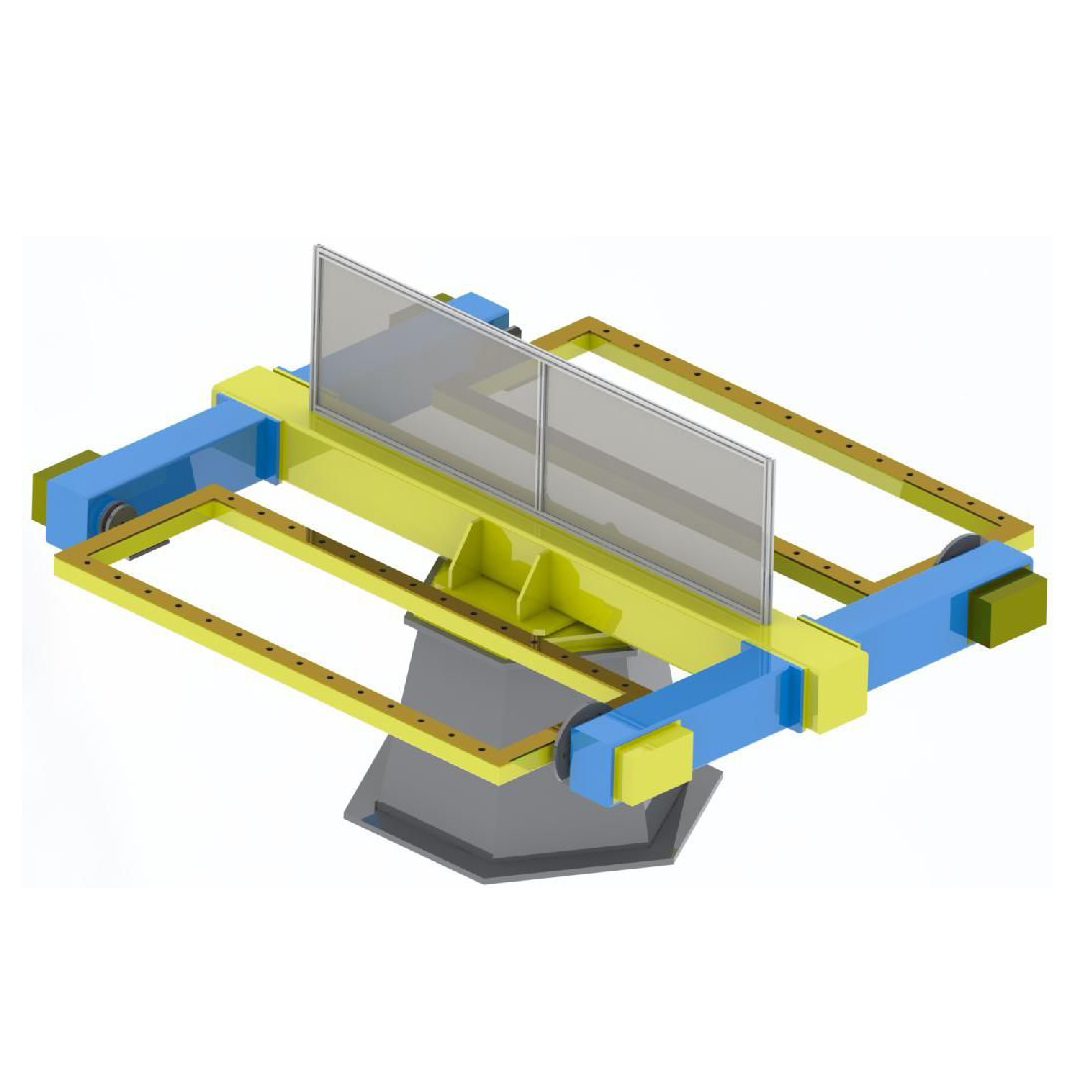
Horisontaalne pöörlev kolmeteljeline servopositsioneerija

Vertikaalse pöördega kolmeteljeline servopositsioneerija
Struktuuri tutvustus
Kolmeteljeline vertikaalne pöördeservo positsioneerija koosneb peamiselt keevitatud integreeritud raamist, pöörde nihkeraamist, vahelduvvoolu servomootorist ja RV täppisreduktorist, pöördtoest, juhtivast mehhanismist, kaitsekilbist ja elektrilisest juhtimissüsteemist.
Keevitatud raam on keevitatud kvaliteetsetest profiilidest. Pärast lõõmutamist ja pingete leevendamist töödeldakse seda professionaalselt, et tagada kõrge töötlemise täpsus ja võtmepositsioonide täpsus. Pind on pihustatud roostevastase värviga, mis on ilus ja helde ning värvi saab kliendi vajaduste järgi kohandada.
Pööramisraam keevitatakse kvaliteetsest profiilterasest ja töödeldakse professionaalselt. Pinnale tehakse standardsed keermestatud augud positsioneerimisvahendite paigaldamiseks ning teostatakse värvimine, mustamine ja roostekaitsetöötlus.
Toitemehhanismiks on valitud RV reduktoriga vahelduvvoolu servomootor, mis tagab pöörlemise stabiilsuse, positsioneerimise täpsuse ja
Pikk vastupidavus ja madal rikete määr. Juhtiv mehhanism on valmistatud messingist, millel on hea juhtivus. Juhtiv alus on integreeritud isolatsiooniga, mis kaitseb tõhusalt servomootorit, robotit ja keevitusvooluallikat.
Elektriline juhtimissüsteem kasutab positsioneeri juhtimiseks Jaapani Omron PLC-d, mis tagab stabiilse jõudluse ja madala rikkemäära. Elektrilised komponendid on valitud tuntud kaubamärkide hulgast nii kodu- kui ka välismaal, et tagada kvaliteet ja stabiilsus.
Valgust blokeeriv kilp on kokku pandud alumiiniumprofiilist ja alumiiniumplastplaadist, et kaitsta keevitamise ja lõikamise ajal tekkiva kaarvalguse eest.








